Abhishek Cauligi

Hi! I am an Assistant Professor in the Department of Mechanical Engineering at Johns Hopkins University, where I lead the Autonomous Control & Exploration Lab. My research focuses on developing safe and computationally efficient decision making algorithms for robotic systems, with a particular focus on studying how machine learning can be combined with model-based planning and optimal control techniques.
Prior to this, I was a Robotics Technologist with the Robotic Surface Mobility Group (347F) at NASA Jet Propulsion Laboratory and received my PhD. in Aeronautics & Astronautics at Stanford University as a member of the Autonomous Systems Lab.
news
| Jun 22, 2025 | Our paper on Federated Multi-Agent Mapping for Planetary Exploration was accepted to IEEE International Conference on Intelligent Robots and Systems (IROS) 2025! |
|---|---|
| May 19, 2025 | Our paper on Constraint-Informed Learning for Warm Starting Trajectory Optimization was accepted into Journal of Guidance, Control, and Dynamics (JGCD)! |
| Mar 22, 2025 | Our paper on Transformer-based tight constraint prediction for efficient powered descent guidance was accepted into Journal of Guidance, Control, and Dynamics (JGCD)! |
selected publications
-
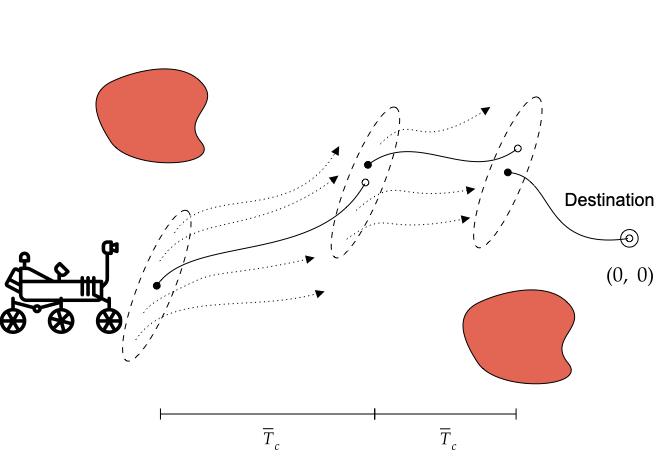 Expected Time-Optimal Control: a Particle MPC-based Approach via Sequential Convex ProgrammingIn Proc. IEEE Conf. on Decision and Control, 2024
Expected Time-Optimal Control: a Particle MPC-based Approach via Sequential Convex ProgrammingIn Proc. IEEE Conf. on Decision and Control, 2024 -
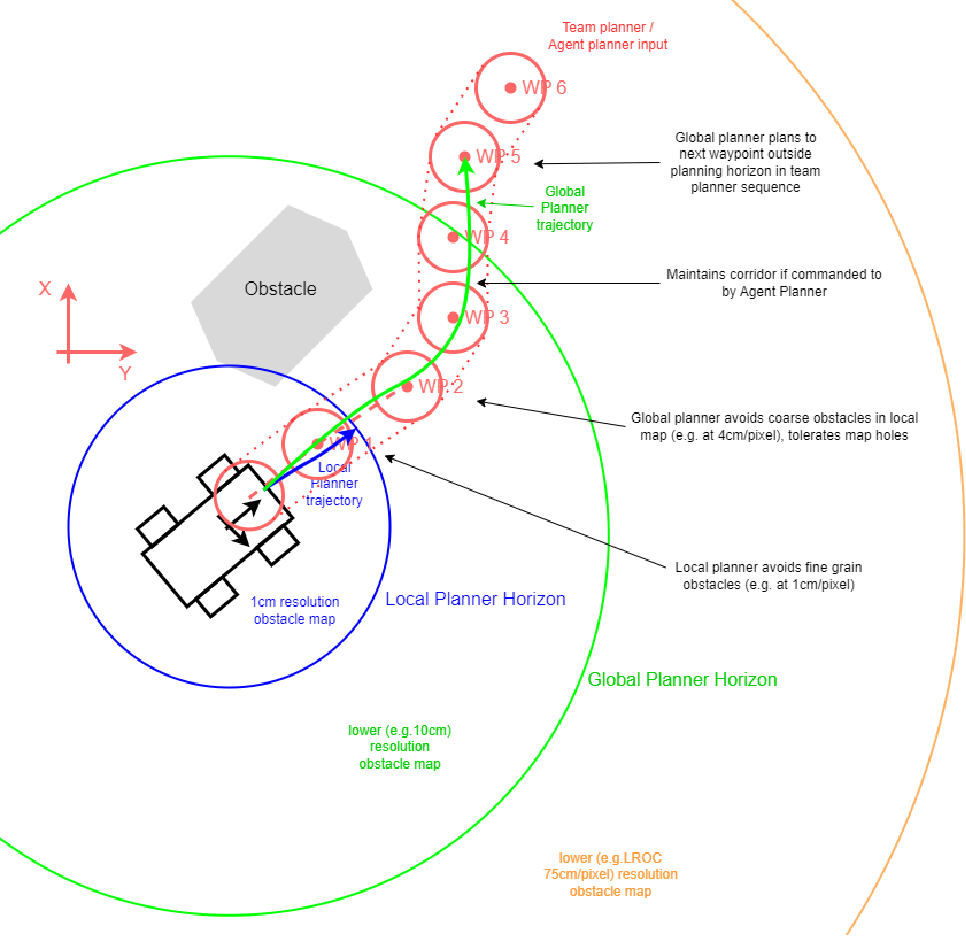 Multi-Agent Autonomy for Space Exploration on the CADRE Lunar Technology Demonstration MissionIn IEEE Aerospace Conference, 2024
Multi-Agent Autonomy for Space Exploration on the CADRE Lunar Technology Demonstration MissionIn IEEE Aerospace Conference, 2024 -
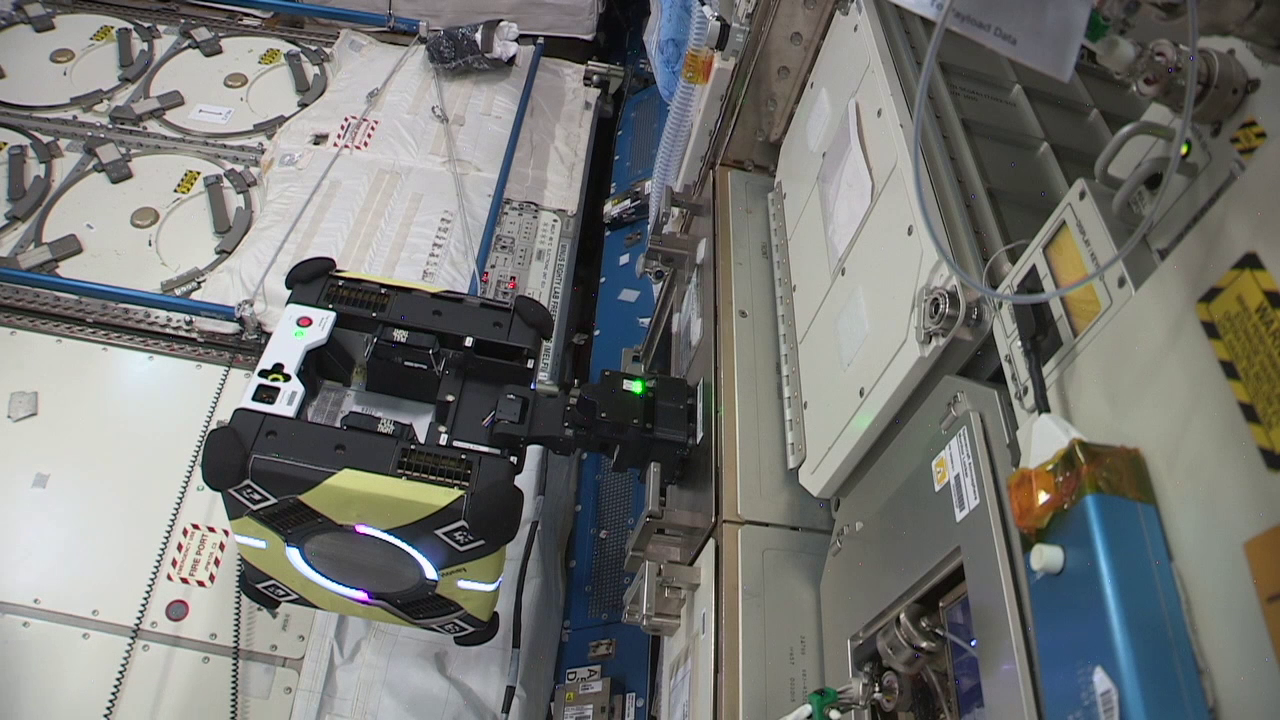 Testing Gecko-Inspired Adhesives with Astrobee Aboard the ISSIEEE Robotics and Automation Magazine, 2022
Testing Gecko-Inspired Adhesives with Astrobee Aboard the ISSIEEE Robotics and Automation Magazine, 2022


